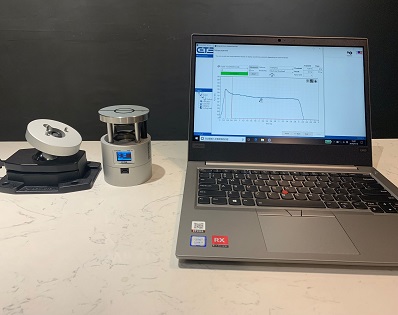
本测试系统用于测试协作机器人瞬态和准静态碰撞力和压力。符合 ISO/TS 15066、ISO 10218-1、ISO 10218-2 和 RIA TR R15.806-2018。
测试系统由软件、具备9个弹性系数的力测量装置和压力测量装置组成。
1、测试软件

主要技术参数:
- 软件可在Win7以上操作系统上运行,具有图形显示模块,以图形的方式显示数据及测量结果,并能够导出csv、xlsx等格式文件
- 软件可依据ISO/TS 15066和和GB/T 36008图4的表示方法,显示测量的力曲线和压力图像,计算并确定瞬态和准静态力的值
- 软件可依据通过二维、三维表示以及使用滤波器评估压力图像。多项数据可以自动测算并分析描述
- 内置ISO/TS 15066和GB/T 36008附表A.2中的生物力学限制选择功能
- 检测结果及报告可以文件或图形形式记录并打印
2、碰撞力测量装置
主要技术参数:
- 测量表面:Φ80mm
- 力测量范围:20N~500N
- 弹性常数:10 N/mm,25N/mm,30 N/mm,35 N/mm,40 N/mm,50 N/mm,60 N/mm,75 N/mm,150 N/mm,符合ISO/TS 15066和GB/T 36008附表A.3
- 最大测量误差:±3% f.v.
- 准确度:±1% f.v.
- 上升/下降时间:≤ 1 ms
- 存储容量:可存储100次单次测量数据
- 瞬态和准静态的力测量结果能在主机的液晶面板上显示
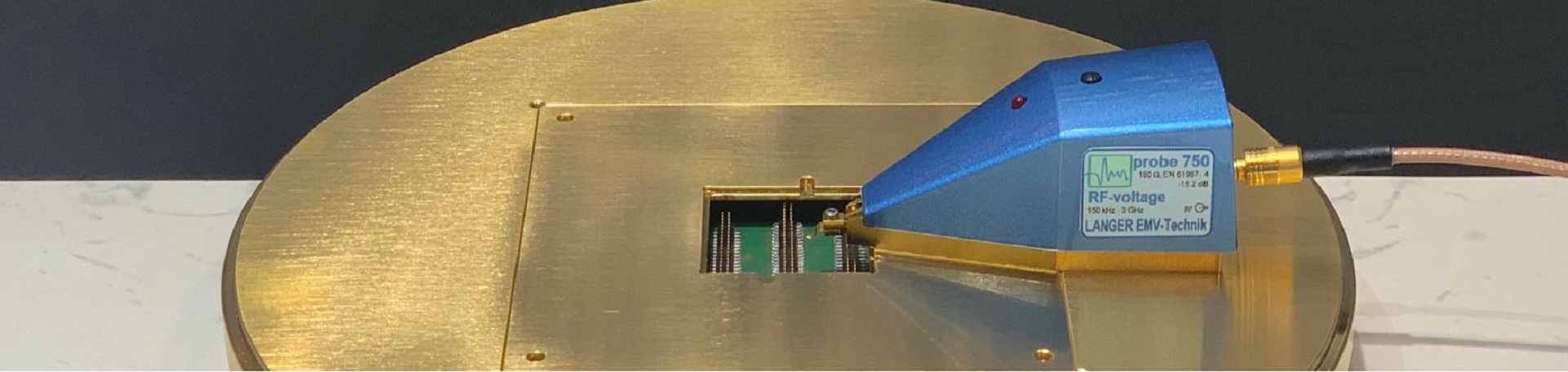
3、碰撞压力测量装置
主要技术参数:
- 基于Prescale测量薄膜,记录压力分布和最大压力
- 通过电子薄膜传感器提供最大压力和压力分布,还可以测量压力曲线








 首页
首页
